nunchuk.h
Note that it is nunchuk, not nunchuck.
This library has been tested with the cheap Chinese made knockoffs of the Wii Nunchuk which are available for about $3 each.
You can follow this guide for how to cut off the connector to wire it to an Arduino, or purchase an Adapter for about 30 cents each.
- Buy Wii Nunchuk
- Buy Breakout Adapter
- Read Usage Guide
/**
* @license Nunchuk Arduino library v0.0.1 16/12/2016
* http://www.xarg.org/2016/12/arduino-nunchuk-library/
*
* Copyright (c) 2016, Robert Eisele (robert@xarg.org)
* Dual licensed under the MIT or GPL Version 2 licenses.
* Refactor: bkucenski@gmail.com 2/22/2019
**/
#ifndef NUNCHUK_H
#define NUNCHUK_H
#include <Wire.h>
// The Nunchuk I2C address
#define NUNCHUK_ADDRESS 0x52
// the clock speed, 400,000 works
#define CLOCK_NUNCHUK 400000
// Calibration accelerometer values, depends on your Nunchuk
#define NUNCHUK_ACCEL_X_ZERO 512
#define NUNCHUK_ACCEL_Y_ZERO 512
#define NUNCHUK_ACCEL_Z_ZERO 512
// Calibration joystick values
#define NUNCHUK_JOYSTICK_X_ZERO 127
#define NUNCHUK_JOYSTICK_Y_ZERO 128
uint8_t nunchuk_data[6];
uint8_t nunchuk_cali[16];
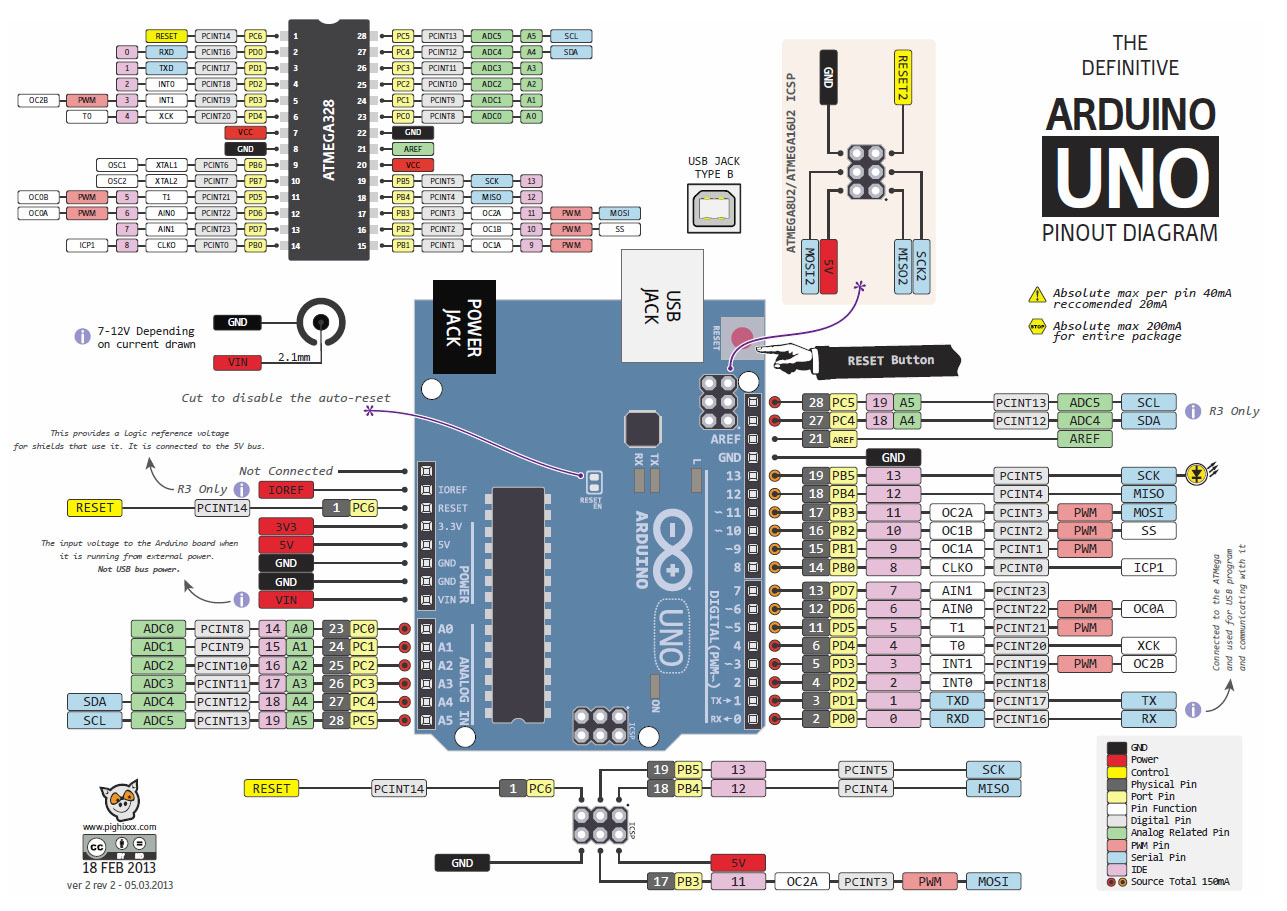
#if defined(__AVR_ATmega168__) || defined(__AVR_ATmega328P__) // Only Arduino UNO
/**
* Use normal analog ports as power supply, which is useful if you want to have all pins in a row
* Like for the famous WiiChuck adapter
* @see https://todbot.com/blog/2008/02/18/wiichuck-wii-nunchuck-adapter-available/
*/
static void NunchukInitPower() {
// Add power supply for port C2 (GND) and C3 (PWR)
PORTC &= ~_BV(PORTC2);
PORTC |= _BV(PORTC3);
DDRC |= _BV(PORTC2) | _BV(PORTC3);
delay(100);
}
#endif
/**
* Initializes the Nunchuk communication by sending a sequence of bytes
*/
static void NunchukInit() {
// Change TWI speed for nuchuk, which uses Fast-TWI (400kHz)
Wire.setClock(CLOCK_NUNCHUK);
// delay(1);
Wire.beginTransmission(NUNCHUK_ADDRESS);
Wire.write(0xF0);
Wire.write(0x55);
Wire.endTransmission();
// delay(1);
Wire.beginTransmission(NUNCHUK_ADDRESS);
Wire.write(0xFB);
Wire.write(0x00);
Wire.endTransmission();
// delay(1);
}
/**
* Central function to read a full chunk of data from Nunchuk
*
* @return A boolean if the data transfer was successful
*/
static uint8_t NunchukRead() {
uint8_t i;
Wire.requestFrom(NUNCHUK_ADDRESS, 6);
//delayMicroseconds(10);
for (i = 0; i < 6 && Wire.available(); i++) {
nunchuk_data[i] = Wire.read();
}
Wire.beginTransmission(NUNCHUK_ADDRESS);
Wire.write(0x00);
// delayMicroseconds(100);
Wire.endTransmission();
return i == 6;
}
/**
* Checks the current state of button Z
*/
static uint8_t NunchukZ() {
return (~nunchuk_data[5] >> 0) & 1;
}
/**
* Checks the current state of button C
*/
static uint8_t NunchukC() {
return (~nunchuk_data[5] >> 1) & 1;
}
/**
* Retrieves the raw X-value of the joystick
*/
static uint8_t NunchukXRaw() {
return nunchuk_data[0];
}
/**
* Retrieves the raw Y-value of the joystick
*/
static uint8_t NunchukYRaw() {
return nunchuk_data[1];
}
/**
* Retrieves the calibrated X-value of the joystick
*/
static int16_t NunchukX() {
return (int16_t) nunchuk_data[0] - (int16_t) NUNCHUK_JOYSTICK_X_ZERO;
}
/**
* Retrieves the calibrated Y-value of the joystick
*/
static int16_t NunchukY() {
return (int16_t) nunchuk_data[1] - (int16_t) NUNCHUK_JOYSTICK_Y_ZERO;
}
/**
* Calculates the angle of the joystick
*/
static float NunchukAngle() {
return atan2((float) NunchukX(), (float) NunchukY());
}
/**
* Retrieves the raw X-value of the accelerometer
*/
static uint16_t NunchukXAccelRaw() {
return ((uint16_t) nunchuk_data[2] << 2) | ((nunchuk_data[5] >> 2) & 3);
}
/**
* Retrieves the raw Y-value of the accelerometer
*/
static uint16_t NunchukYAccelRaw() {
return ((uint16_t) nunchuk_data[3] << 2) | ((nunchuk_data[5] >> 4) & 3);
}
/**
* Retrieves the raw Z-value of the accelerometer
*/
static uint16_t NunchukZAccelRaw() {
return ((uint16_t) nunchuk_data[4] << 2) | ((nunchuk_data[5] >> 6) & 3);
}
/**
* Retrieves the calibrated X-value of the accelerometer
*/
static int16_t NunchukXAccel() {
return (int16_t) NunchukXAccelRaw() - (int16_t) NUNCHUK_ACCEL_X_ZERO;
}
/**
* Retrieves the calibrated Y-value of the accelerometer
*/
static int16_t NunchukYAccel() {
return (int16_t) NunchukYAccelRaw() - (int16_t) NUNCHUK_ACCEL_Y_ZERO;
}
/**
* Retrieves the calibrated Z-value of the accelerometer
*/
static int16_t NunchukZAccel() {
return (int16_t) NunchukZAccelRaw() - (int16_t) NUNCHUK_ACCEL_Z_ZERO;
}
/**
* Calculates the pitch angle THETA around y-axis of the Nunchuk in radians
*/
static float NunchukPitch() { // tilt-y
return atan2((float) NunchukYAccel(), (float) NunchukZAccel());
}
/**
* Calculates the roll angle PHI around x-axis of the Nunchuk in radians
*/
static float NunchukRoll() { // tilt-x
return atan2((float) NunchukXAccel(), (float) NunchukZAccel());
}
/**
* A handy function to print either verbose information of the Nunchuk or a CSV stream for Processing
*/
static void NunchukPrintDebug() {
Serial.print("joy: ");
Serial.print(NunchukX(), DEC);
Serial.print(", ");
Serial.print(NunchukY(), DEC);
Serial.print(" acc:");
Serial.print(NunchukXAccel(), DEC);
Serial.print(", ");
Serial.print(NunchukYAccel(), DEC);
Serial.print(", ");
Serial.print(NunchukZAccel(), DEC);
Serial.print(" but:");
Serial.print(NunchukZ(), DEC);
Serial.print(", ");
Serial.print(NunchukC(), DEC);
Serial.print("\n");
}
#endif

{kind=link}
{kind=link}
{kind=link}